

1. Tachymétrie ( génératrice tachymétrique )
Elle délivre une tension proportionnelle à sa vitesse de rotation. Son principal domaine d'application se situe dans la régulation de vitesse d'un moteur électrique.
Le système évolue de sorte que l'erreur de vitesse e soit nulle.
Caractéristiques essentielles d'une tachymétrie
- vitesse maximale de rotation (en tours par minute),
- constante de f.e.m. (en volts à 1000 trs/mn ou en v/tr/mn),
- linéarité (en %),
- ondulation crête à crête (en %),
- courant maximal.
Pour atténuer l'ondulation sur la tension de sortie, un filtrage peut s'avérer nécessaire:
La fréquence de coupure du filtre passe-bas est donnée par: fc = 1/(2.p.R.C).
Différents types
1. génératrice à courant continu

L'excitation est assurée par des aimants permanents.
U = E - r.I et U = Rc.I (Rc est la résistance de charge)
d'où: U = E / (1+r/Rc) = Ke.W / (1+r/Rc) = K.W
avec Ke: constante de f.e.m. en v/rd/s et W : pulsation en rd/s
La caractéristique tension-vitesse est donc linéaire.
2. génératrice synchrone (alternateur)
L'excitation (rotor) est aussi assurée par des aimants permanents. La tension de sortie doit être redressée et filtrée avant d'être exploitée.
E et Z sont les f.e.m. et impédance par phase.
V = E - Z . I et V = Rc . I (Rc résistance de charge par phase)
d'où: V = E / (1 + Z / Rc)
Z est fonction de la pulsation des grandeurs électriques, donc dépend de la vitesse de rotation de la génératrice: la caractéristique tension-vitesse n'est plus linéaire.
Tableau comparatif des génératrices tachymétriques
| Génératrice | à courant continu | synchrone |
| Linéarité | bonne | à vide seulement |
| Collecteur et balais (entretien) | oui | non |
| Information sens de rotation | oui par le signe de la tension | non |
| Prix | élevé car fabrication délicate | plus économique |
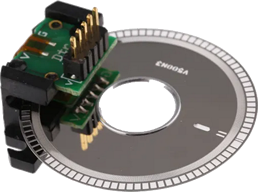
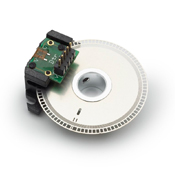
2.Codeur incrémental (codeur relatif)
Principe: une lumière émise par une diode électroluminescente est réfléchie par les graduations d'un disque vers un phototransistor qui se sature et se bloque à la cadence du défilement des graduations.

Le codeur incrémental est surtout utilisé dans les systèmes dont le traitement de l'information est entièrement numérique. Ses impulsions sont comptabilisées de façon à donner une information concernant la position (nombre d'impulsions délivrées depuis une position d'origine) ou /et une information concernant la vitesse (nombre d'impulsions par unité de temps). Dans ce dernier cas, il évite l'emploi d'une génératrice tachymétrique (il est cependant peu précis aux très basses fréquences de rotation).
Un codeur incrémental possède généralement plusieurs voies:
- voie Z donnant une impulsion par tour,
- voie A donnant n impulsions par tour,
- voie B identique à voie A, mais dont les signaux sont déphasés de + ou - 90°, suivant le sens de rotation.
La simple utilisation d'une bascule D permet d'obtenir une information logique concernant le sens de rotation:

Caractéristiques principales d'un codeur incrémental
- nombre de points par tour ou nombre d'impulsions par tour (exemple: 500 points/tr),
- nombre de voies ou nombre de pistes (exemple: 6 pistes A, B, Z, A*, B*, Z*),
- tension d'alimentation,
- vitesse maximale de rotation.
![]() Télécharger la documentation technique... (572 Ko)
Télécharger la documentation technique... (572 Ko)
3. Codeur absolu
Principe: un disque est divisé en pistes .Chaque piste comporte une alternance de secteurs réfléchissants et absorbants. Comme pour le codeur incrémental, un émetteur-récepteur par piste fournit les informations. Le nombre de pistes fixe le nombre de positions discrètes pouvant être définies: 1 piste = 2 positions, 2 pistes = 4 positions, 3 pistes = 8 positions... n pistes = 2 exp n positions.

Son principal avantage est qu'il donne une information de position absolue, alors que le codeur incrémental donne la position relative (par rapport à une position initiale variable). En revanche, il est plus complexe, du fait qu'une grande précision de position dépend du nombre de pistes (alors que la précision d'un codeur incrémental dépend seulement du nombre de graduations sur la piste).
Exemple d'un codeur absolu 12 pistes, soit 4096 points (212):
Comparaison de 2 codeurs 512 points
| Type du codeur | Incrémental | Absolu |
| Nombre de pistes | 3 (A,B,Z) | 9 (A,B,C,D,E,F,G,H,I) |
| Nombre de capteurs(E-R) | 3 | 9 |
| Connecteur | 5 broches utiles | 11 broches utiles |
| Nombre de points par tour | 512 | 512 |
| Information 1 tour | Immédiate par Z | Possible par décodage des pistes A,B,C... |
| Information sens | Facile à élaborer à partir des signaux A et B | Possible |
| Information vitesse | Comptage sur A ou B | Comptage sur A |
Calcul du nombre de points d'un codeur
 |
N = 360 x (1/P) x (Fm/Fc) N: nombre de points du codeur P: précision souhaitée en degrés Fm: fréquence de rotation du mobile Fc: fréquence de rotation du codeur |
Mouvement de translation
| N = (1/P) x (Fe/Fc) x Q N: nombre de points du codeur P: précision souhaitée en mm Fe: fréquence de rotation de l'entraînement Fc: fréquence de rotation du codeur Q: rapport de conversion de mouvement rotation-translation |
| chaîne cinématique avec vis à bille pas de vis = 10mm/tour Q = pas de vis = 10 un tour de vis = déplacement linéaire de 10mm |
 |
rouleau entraînant |
 |
Voir aussi : capteur resolver
Codeurs rotatifs (animation Flash)